This paper describes the Unmanned Underwater Vehicle UUV Simulator an extension of the open-source robotics simulator Gazebo to underwater scenarios that can simulate multiple underwater robots and intervention tasks using robotic manipulators. Unmanned Underwater Vehicle Simulator Enabling the Simulation of Multi-Robot Underwater Missions with Gazebo Musa Morena Marcusso Manhães Corporate Sector Research and Advance Engineering CR Robert Bosch GmbH Renningen Germany ROSCon 2018 29082018 Author.

Pdf House Plans Garage Plans Shed Plans Shed Plans Garage Plans House Plans
Both the simulation and experimental results agree very well and show the usability of the developed environment.
Gazebo simulator pdf. Marcusso Manhaes Musa Morena CRAEI Created Date. Describe OS depedendies Gazebo other ROS packages other OS packages 312Compilation describe how to compile the simulator 313Testing describe how to launch an example scenario 32Environmental Disturbances Describe how the disturbances work. The main reason we use Gazebo as the simulator is that Gazebo offers a convenient interface with Robot Operating System ROS 12 which is used in our real robot code.
In this paper we present a simulator that has been developed using Gazebo and ROS to study cable-driven parallel robots. Gazebo 11 is the last major release of Gazebo. For Robotic Simulation in Gazebo Steven Peters scpeters John Hsu hsu ROSCon 2014.
URDF and SDF The original file for performing simulation is the Universal Robot Description Format or URDF. This paper evaluates the usability of the robot middleware ROS Robot Operating System and the robot simulation environment Gazebo with the help of experimental testing. There are a few differences between the two simulators.
Since then Gazebo has become a mature open-source project that is developed and relied upon by the global robotics community for a wide variety of applications. All currently supported Gazebo versions are still being maintained and may receive new backwards-compatible features and bug fixes until their end-of-life. This is achieved mainly through a set of newly implemented plugins that model underwater hydrostatic and hydrodynamic effects.
When this simulator is ready you can test your robot navigation code with the simulator. This is a commercial package primarily designed 0-7803-8463-6042000 2004 IEEE. Gazebo Cont gzserver executable runs the physics update-loop and sensor data generation This is core of Gazebo and can be used independently of any graphical interface Gzclient executable runs the QT based user interface provides a nice visualization of simulation and convenient controls over various simulation properties.
This will save you a lot of time and resources. Gazebo is a simulator for a small group of robots in а 3D environment. And incorporated into Gazebo the line between simulation and reality will continue to blur but accurac y in terms of robot sensors and actuators will remain an overriding goal.
The Gazebo robot simulation. A video showing how to develop the simulation is shared with you. The team also maintains ROS packages for applications that want to work with Gazebo through ROS interfaces topics services and operations.
Real-time dynamic simulation of such robots is. Gazebo Tutorial by Rasko Pjesivac What is Gazebo. DARPA Virtual Robotics Challenge.
Check out Ignition Robotics to. Gazebo is being refactored into the new Ignition Gazebo simulator. Since our plugins conform with the YARP layer used.
If no suitable plugin is available submitting organizations may a create a plugin for the corresponding sensor and include it with the submission or b remove the sensor from the simulation model and add the discrepancy to the list described in Section 35. This paper presents a set of plugins for the Gazebo simulator that enables the interoperability between a robot controlled using the YARP framework and Gazebo itself. Gazebo the code developed for the simulation process can be directly implemented in the real robot without modications.
Sensors should be modeled using existing Ignition Gazebo plugins when appropriate. It is a supported file type for rviz. Gazebo tags to enable more of a map -like structure creating an invisible link between the rocker and base.
Gazebo tutorials are organized into Guided and CategorizedDocumentation is also available for the API and a help forum is located at Gazebo Answers. In this paper autonomous navigation tasks and 3D-mapping simulation using control programs under ROS are presented. Since our plugins conform with the YARP layer used on the real robot applications written for our.
This xml-like file type is used heavily in ROS for simulation and testing. It relies on Open Dynamics Engine ODE and ROS-compatible simulator while MORSE provides a flexible Object-Oriented Graphics Rendering Engine OGRE to pro- interface at variable levels of abstraction and ease of program- vide 3D robotsenvironments. ROSGazebo Quadrotor Simulator Danping Zou Key Lab of Navigation and Location-based Service dpzousjtueducn July 14th 2014.
Gazebo is an open-source simulator that can handle different Dynamic Engines developed by the Open Source Robotics Foundation. Creating a ROS Gazebo maze simulation for Turtlebot3 In this tutorial you are creating a maze simulation in Gazebo simulator. In this paper the open source simulator Gazebo 11 is adopted to simulate the motions of a soccer robot.
The Gazebo server gzserver reads the world file to generate and populate a world This file is formatted using SDF Simulation Description format or URDF Unified Robot Description Format Has a world extension Contains all the elements in a simulation including robots lights sensors and static objects Willow Garage World. Outline DARPA Virtual Robotics Challenge Overview of the Open Source Gazebo Simulator Physics Engines in Gazebo Benchmark Physics Tests Robotic Walking Task Conclusion. Rapyutaio allows users to run the simulation application with gazebo simulator in the cloud.
Gazebo was created in 2002 to support development of ground robot applications for indoor and outdoor environments 1. Gazebos team maintains a number of 3D models that are easily accessible for use in projects. Similarly to Stage a 2D environment simulator Gazebo can simulate a population of robots objects and sensors.
Gazebo is an open-source simulator that can handle different Dynamic Engines developed by the Open Source Robotics Foundation. This paper presents a set of plugins for the Gazebo simulator that enables the interoperability between a robot controlled using the YARP framework and Gazebo itself. A few notable systems include COSIMIR 4 de veloped at Festo.
Gazebo is undoubtedly the most used 3D with ROS.

Gazebo And Tum Simulator With The Drone Application Download Scientific Diagram
Gazebo Media


Wine Bottle Wall Gazebo Wine Bottle Wall Bottle Wall Tree

Vasto Youtube Gazebo Gazebo Gazebo Assembly Gazebo Decorations

Pin On Party Reception
Gazebo In 5 Mins Archives The Construct

Sae J1939 Ecu Programming Vehicle Bus Simulation With Arduino Controller Area Network Arduino Arduino Pdf
Using Pioneer Robot In Gazebo Simulation A Four Floor Aliased World Download Scientific Diagram

Biologia Molecular E Ingenieria Genetica 2ª Edicion Angel Herraez Sanchez 2012 Elsevier Audio Books Kindle Books Molecular
Ros Gazebo Quadrotor Simulator Pdf Pdf Unmanned Aerial Vehicle Simulation


Gazebo Is A 3d Multi Robot Simulator With Dynamics It Offers The Ability To Accurately And Efficiently Simulate Populations Of Robots Gazebo Learn Robotics Robot

Pin By Diedre Benson On Sims In 2021 Sims House Sims House Design Sims 4 House Building
Screenshot Of The Gui Of Gazebo Showing The Rendering Of The Atlas Urdf Download Scientific Diagram
Ros Gazebo Quadrotor Simulator Pdf Pdf Unmanned Aerial Vehicle Simulation

Gazebo Media


Vasto Youtube Gazebo Gazebo Gazebo Assembly Gazebo Decorations
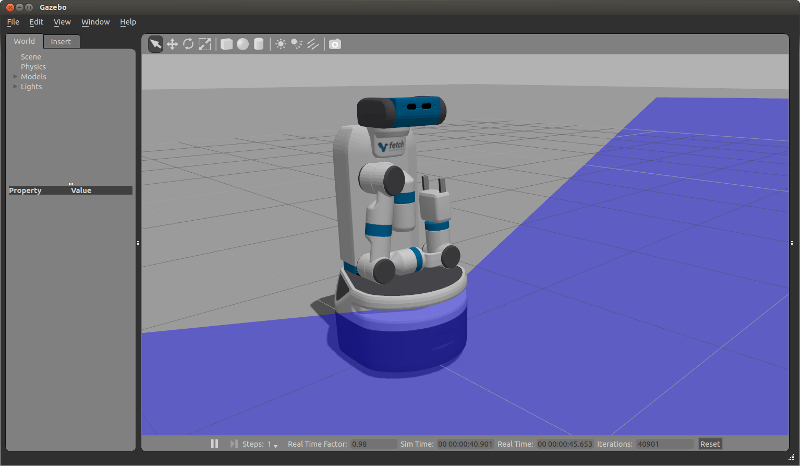
Tutorial Gazebo Simulation Fetch Freight Research Edition Melodic Documentation

Ensambles De Madera Pdf Buscar Con Google Piezas De Madera Restirador Ensamble Madera
Gazebo Media


