Videos you watch may be added to the TVs watch history and influence TV recommendations. Now run the three following lines in three separate terminal windows.

Basic Overview Of Ros Gazebo Px4 Simulation Architecture Youtube
This is a flight simulator for rovers boats multirotors VTOL fixed wing.

Gazebo simulator px4. First install the PX4 SITL jMAVSimGazebo simulation environment. It supports standalone use without ROS or SITL ROS. Quad Iris and Solo Hex Typhoon H480 Generic quad delta VTOL Tailsitter.
Videos you watch may be added to the TVs watch history and influence TV recommendations. Unlike basic px4 Gazebo simulation make px4_sitl_default gazebo It does find connection with Gazebo right away and does work with additional mavros launch. All currently supported Gazebo versions are still being maintained and may receive new backwards-compatible features and bug fixes until their end-of-life.
For example to start a. If playback doesnt begin shortly try restarting your device. Deep reinforcement learning for UAV in Gazebo simulation environment.
The source code for supported worlds can be found on GitHub here. It supports standalone use without ROS or SITL ROS. What this means is that PX4 and the simulator wait on each other for sensor and actuator messages rather than running at their own speeds.
This opens up Gazebo Rviz and an octomap server. This video shows the Gazebo simulator with the sitl_gazebo plugin simulating a PX4 controlled VTOL quad plane performing a fully autonomous mission. Gazebo PX4 SITL simulation issue.
Now click the add button in the bottom left and select MarkerArray. It uses the motor model and other pieces from the RotorS simulator but in contrast to RotorS has no dependency on ROS. Run a simulation by starting PX4 SITL and gazebo with the airframe configuration to load multicopters planes VTOL optical flow and multi-vehicle simulations are supported.
Gazebo is a powerful 3D simulation environment for autonomous robots that is particularly suitable for testing object-avoidance and computer vision. Im trying to implement the intel T265 into iris drone and simulate in SITL gazebo. Check out Ignition Robotics to.
Gazebo can also be used with HITL and for multi-vehicle simulation. If playback doesnt begin shortly try restarting your device. It supports standalone use without ROS or SITL ROS.
PX4 is a great platform to implement a UAV system based on a opensource autopilot. Gazebo is a 3D simulation environment for autonomous robots. Then double click the MarkerArray and.
If playback doesnt begin shortly try restarting your device. Gazebo 11 is the last major release of Gazebo. Gazebo is a powerful 3D simulation environment for autonomous robots that is particularly suitable for testing object-avoidance and computer vision.
If playback doesnt begin shortly try restarting your device. Quad Iris and Solo Hex Typhoon H480 Generic quad delta VTOL Tailsitter. The OctoMap library is an open source library for generating volumetric 3D environment models from sensor data.
The easiest way to do this is to open a terminal in the root directory of the PX4 PX4-Autopilot repository and call make for the desired target. This topic provides imageryinformation about the Gazebo worlds supported by PX4. Videos you watch may be added to the TVs watch history and influence TV recommendations.
INFO simulator Waiting for simulator to connect on TCP port 4560 INFO simulator Simulator connected on TCP port 4560. This model data can then be used by a drone for navigation and obstacle avoidance. Luckily there is one here.
In Rviz change the field Fixed Frame from map to world in the top left of the window. You can also manually specify the world to load. This page describes its use with SITL and a single vehicle.
Deep reinforcement learning for UAV in Gazebo simulation environment - GitHub - PX4-Gazebo-Simulationdrl_uav. PX4 Autopilot - Open Source Flight Control. One of the great features of PX4 is that you can run a SITL simulation Software in the loop simulation to simulate your flight on simulation.
PX4 SITL and the simulators jMAVSim or Gazebo have been set up to run in lockstep. Gazebo is a 3D simulation environment for autonomous robots. Unlike the D435 the T265 does not come with its own gazebo plugin for simulation.
PX4 Autopilot - Open Source Flight Control. ROS with Gazebo Simulation. PX4 Gazebo Plugin Suite for MAVLink SITL and HITL.
PX4 Autopilot - Open Source Flight Control. Gazebo is a 3D simulation environment for autonomous robots. Lockstep Simulation.
This page describes its use with SITL and a single vehicle. Intel T265 with Px4 SITL gazebo simulation. There may be some prerequisites check the INSTALL_RUN_SIMULATIONmd text file for detailed steps.
Asked 2020-04-14 095040 -0500. It supports standalone use without ROS or SITL ROS. OctoMap 3D Models with ROSGazebo.
Gazebo Simulation Loading a Specific World. ROS Robot Operating System can be used with PX4 and the Gazebo simulatorIt uses the MAVROS MAVLink node to communicate with PX4. Gazebo is a 3D simulation environment for autonomous robots.
This guide covers how to use OctoMap with the Gazebo Rotors Simulator and ROS. This is useful as you can check new mission or control algorithms before actually flying the quadrotor and possibly. Specific worlds are loaded by default for different PX4 vehicle make targets.
Gazebo is being refactored into the new Ignition Gazebo simulator. PX4 Autopilot - Open Source Flight Control. Gazebo can also be used with HITL and for multi-vehicle simulation.
Gazebo to receive sensor data from the. After the installation is complete the procedure will leave you at the default compilation subdirectory which is srcFirmware. The ROSGazebo integration with PX4 follows the pattern in the diagram below this shows the generic PX4 simulation environmentPX4 communicates with the simulator eg.
Videos you watch may be added to the TVs watch history and influence TV recommendations.
Gazebo Simulation Px4 V1 9 0 Developer Guide

Sitl Simulation Framework For Each 3dr Iris Quadrotor In Ros Gazebo Download Scientific Diagram

Mavros Px4 Sitl Gazebo Ros Image Topic From A Front Camera Youtube

Ros With Gazebo Simulation Px4 User Guide
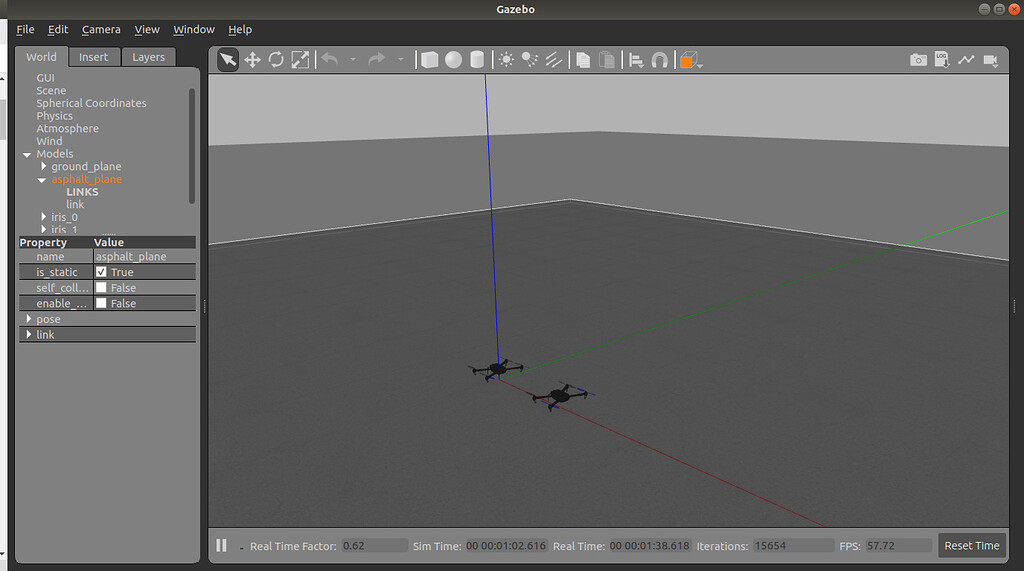
Multi Uav Simulation With Gazebo Not Arming Discussion Forum For Px4 Pixhawk Qgroundcontrol Mavsdk Mavlink

Usb Uart Details In Hitl Simulation Px4 Autopilot Discussion Forum For Px4 Pixhawk Qgroundcontrol Mavsdk Mavlink
Drone Quadcopter


Gazebo Simulation Px4 V1 9 0 Developer Guide

Gazebo Simulation Px4 Developer Guide

Hitl Simulation Px4 Developer Guide


Gazebo Simulation Px4 Developer Guide

Gazebo Simulation Px4 V1 9 0 Developer Guide

Multi Vehicle Drone Simulation In Gazebo Auterion

Hardware In The Loop Simulation Hils Pixhawk Px4 Demonstration Youtube

Multi Vehicle Drone Simulation In Gazebo Auterion
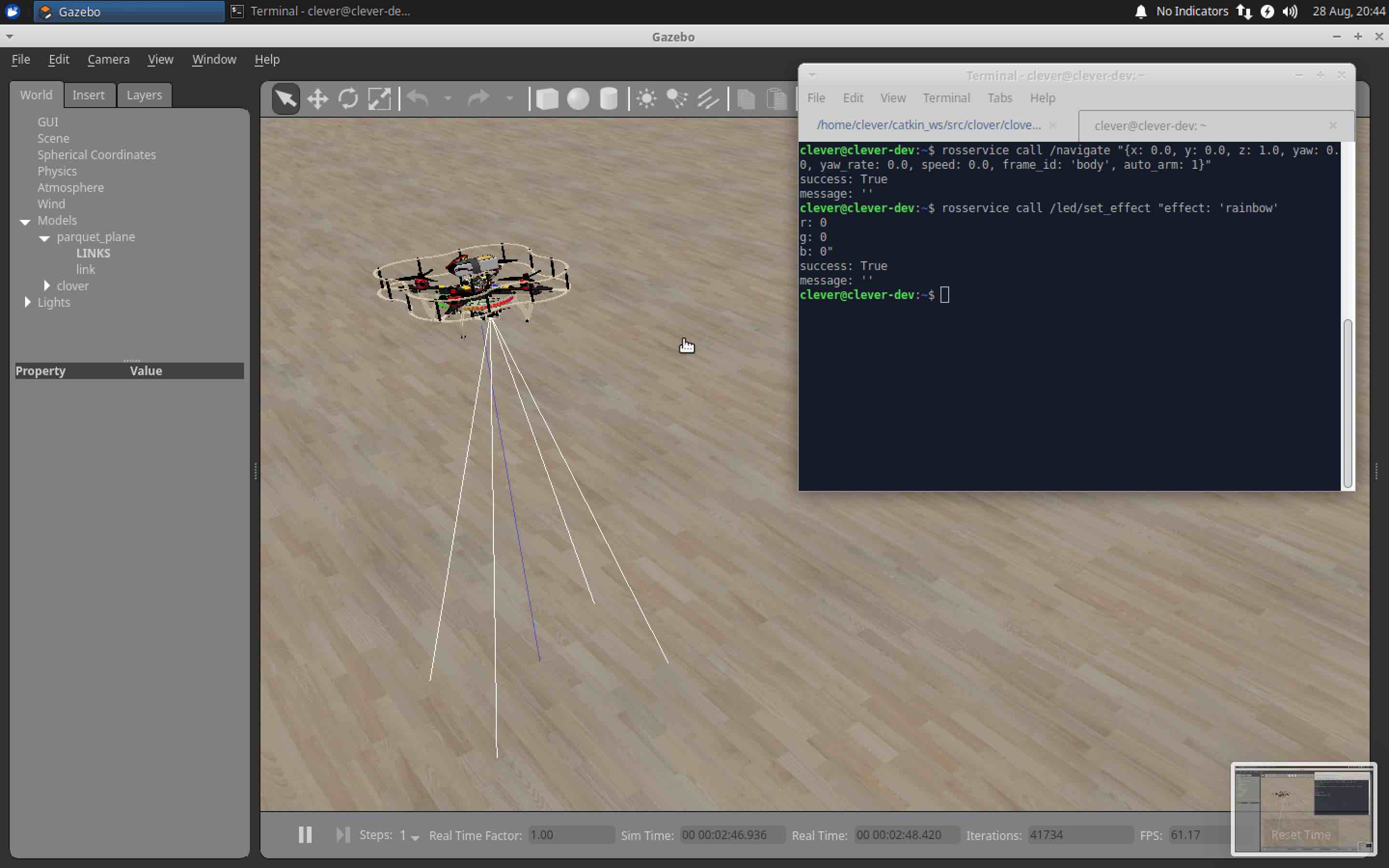
Simulation Clover

Long Reach Manipulator Platform In A Px4 Software In The Loop Sitl Download Scientific Diagram

