We will be using a standard version of ArduPilot but a custom plugin for Gazebo until the gazebo plugin gets merged into Gazebo-master. Gazebo is also released as an Ubuntu official package.
Tutorial Gazebo Simulation Fetch Freight Research Edition Melodic Documentation
The easiest way to setup PX4 simulation with ROS on Ubuntu Linux is to use the standard installation script that can be found at Development Environment on Linux Gazebo with ROS.
Gazebo simulator ubuntu. The default branch in GitHub is gazebo9. Install Gazebo using Ubuntu packages. This changes brings an option about how to install gazebo.
PX4 ROS Melodic the Gazebo 9 simulator and MAVROS. Following the TurtleBot 3 simulation instructions for Gazebo issue the launch command. Ubuntu Bionic 1804 virtual machine works on multiple platforms Windows Mac and Linux and contains the.
Visit here the page loads. Gazebo simulation with emulated interfaces for the Baxter Research Robot. For the users that just run Gazebo simulator with the provided plugins and models and do not plan on developing on top of gazebo its own custom software.
The first launch argumentthe package nameruns the gazebo simulation package. Gazebo7 should be used with ROS Kinetic and Ubuntu 1604 not. Gazebo tutorials are organized into Guided and CategorizedDocumentation is also available for the API and a help forum is located at Gazebo Answers.
Restart the Virtual Machine to fix this issue. ROS_Gazebo_Simulation ubuntu_simsh Go to file Go to file T. You can use MATLAB and Simulink to work with the Gazebo robot simulator and an external ROS Robot Operating System and ROS 2 network.
Ros2 launch turtlebot3_gazebo empty_worldlaunchpy. The script follows the standard ROS Melodic installation. They are also known to be compatible with SITL.
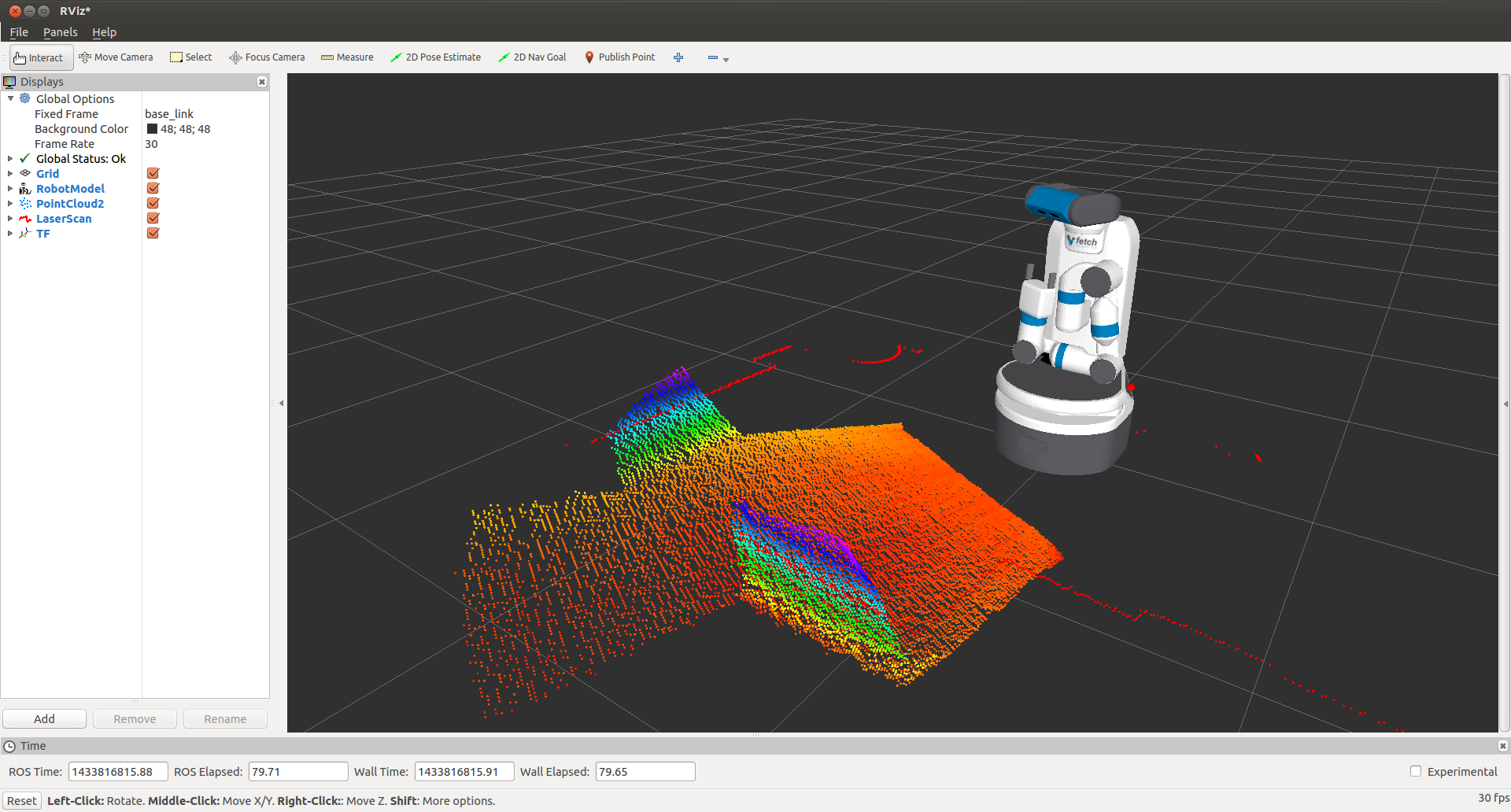
However if you do not have a working graphics card you can still run Gazebo headless at the expense of not having camera simulations and a working gazebo. While similar to game engines Gazebo offers physics simulation at a much higher degree of fidelity a suite of sensors and interfaces for both users and programs. This repository contains the Gazebo simulation for Fetch Robotics Fetch and Freight Research Edition Robots.
In this post I will show you how to launch Gazebo in Ubuntu. Check out Ignition Robotics to. This plugin can be used with or without ROS integration.
Gazebo Simulator running on Windows Install Windows Subsystem for Linux WSL The following steps will let you install Bash Ubuntu on windows without dual booting or using a virtual box. If the Gazebo simulator still fails to load reinstall the plugin using the Install Gazebo Plugin Manually instructions in Perform Co-Simulation between Simulink and Gazebo. Gazebo 11 is the last major release of Gazebo.
Gazebo11 should be used with ROS Noetic and Ubuntu 2004 untested as of 1-2021. Go to line L. Copy path Copy permalink.
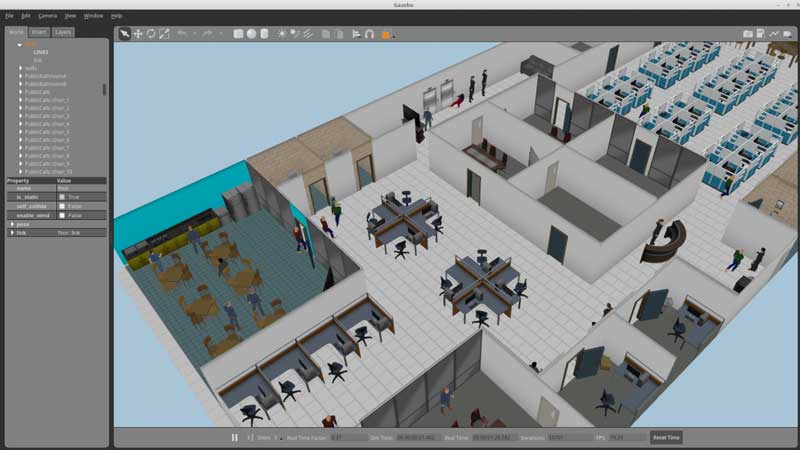
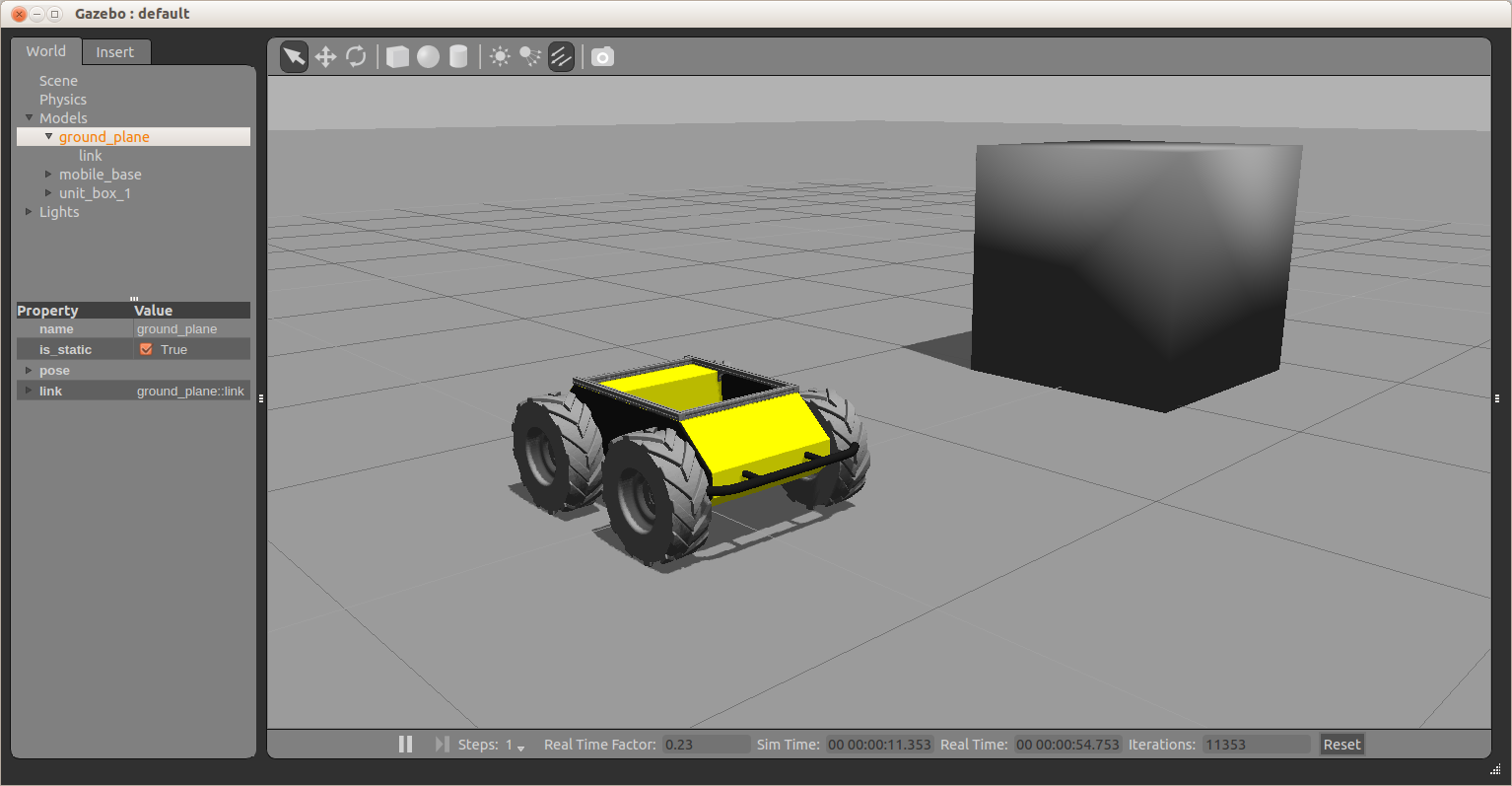
Gazebo is a 3D dynamic simulator with the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. 38 lines 30 sloc 154 KB Raw Blame Open with Desktop View raw View blame. All the necessary software has been installed and configured so were ready to launch the simulator.
Check which version is available for every distribution. Ive been testing out the new NVIDIA driver on Windows 10 with WSL 2. I was hoping if you could help with this problem or had any advice for running gazebo simulation window.
12 rows Past Releases. Gazebo is being refactored into the new Ignition Gazebo simulator. The script installs everything you need.
This page lists installation instructions for the virtual machine that is a supplement to Robotics System Toolbox and ROS Toolbox. Cannot retrieve contributors at this time. Launch the simulator.
The Gazebo robot simulation. All currently supported Gazebo versions are still being maintained and may receive new backwards-compatible features and bug fixes until their end-of-life. Please note that Gazebo requires working graphics card with OpenGL 3D accelerated driver to perform various rendering and image simulation tasks correctly.
This is a curated list of releases. Whenever I use gazebo -- verbose command it throws a few errors as shown in the attached image. If the Gazebo simulator fails to open the default Gazebo port 11345 might be blocked by some other application.
Gazebo9 should be used with ROS Melodic and Ubuntu 1804. Please note the branch. Every now and then the gazebo or rviz window doesnt show me graphics just a black window and sometimes gazebo.
This video shows the steps required to install Gazebo simulator on an Ubuntu distribution as described in the official Gazebo tutorials. Gazebo ships different Ubuntu debian packages following the official packaging guidelines. Executing roslaunch gazebo_ros rubble_worldlaunch opens a Gazebo simulation but with very poor.
The Gazebo robot simulation. Binbash Bash script for setting up a PX4 development. Ive been able to get Docker containers running that utilize the GPU but Im having issues using the GPU in a Gazebo simulation.
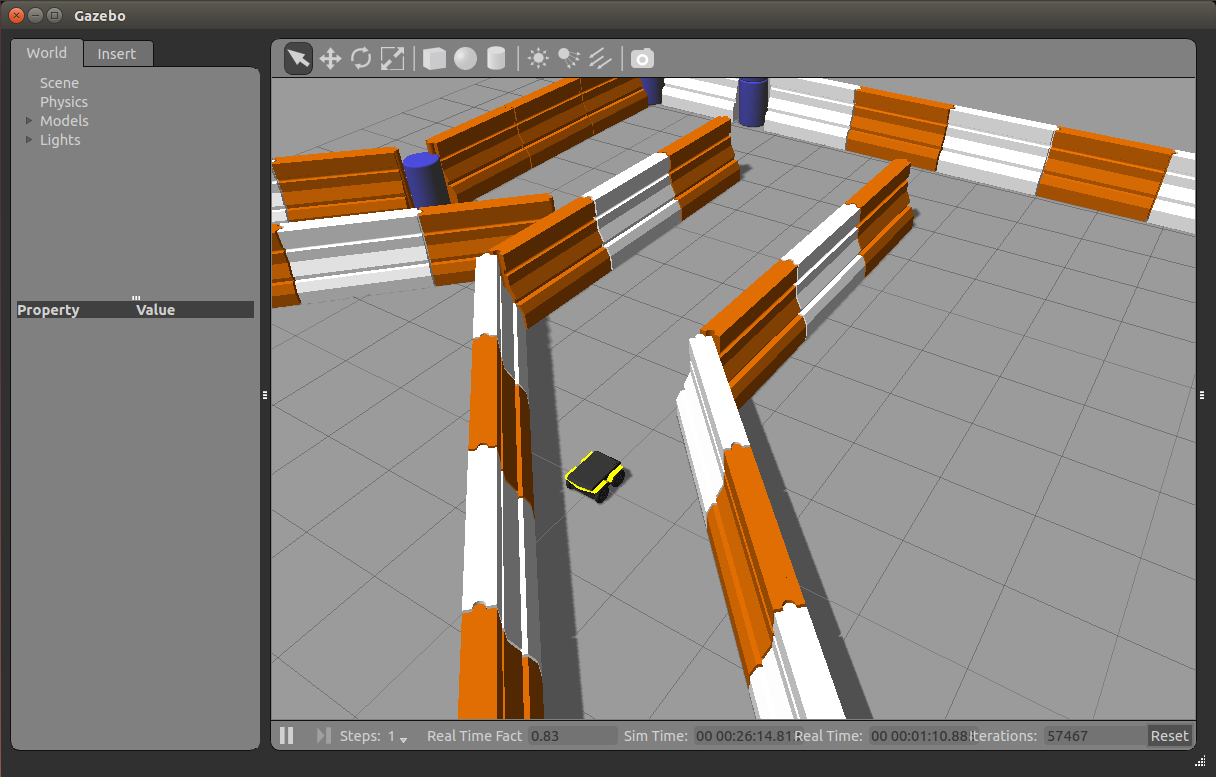
Use Gazebo as an application. I have a 4-core Mac with 107 and VMWare Fusion 5 Ubuntu 1204 -- it works fairly well on 32-bit but I havent gotten it to work on 64-bit. Gazebo is a 3D simulator that is a really good tool if you want to simulate your robot in a complex outdoor or indoor environment.
I have made sure I am using ubuntu 1804 and ROS melodic and installed gazebo9. 1 day agoI cannot launch gazebo on the ubuntu terminl. I installed ROS Kinetic on Ubuntu 1604 in WSL 2 with an X Server installed.
We recommend Ubuntu starting from 1604 or 1804 as those were the platform used for testing this approach.
Ros Q A 191 How To Launch The Parrot Drone Simulation Locally The Construct
Gazebo Is Very Slow Odroid

Gazebo Simulation Px4 Developer Guide
All About Gazebo Ros Gazebo 9 The Construct

Gazebo Simulation Px4 Developer Guide
Robotic Simulation Scenarios With Gazebo And Ros

How To Move A Gazebo Model From Terminal Varhowto

Integrating Sonar And Ir Sensor Plugin To Robot Model In Gazebo With Ros By Thiruventhan Arimac Medium

Robotic Simulation Scenarios With Gazebo And Ros

Install Gazebo Using Ubuntu Packages Youtube
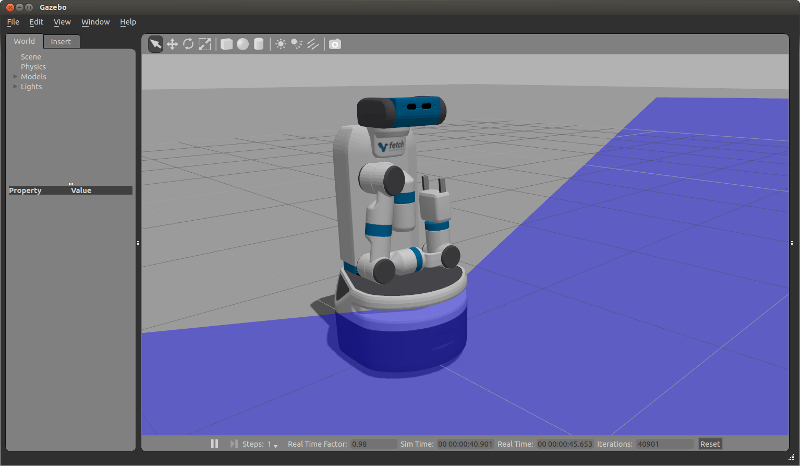
Tutorial Gazebo Simulation Fetch Freight Research Edition Melodic Documentation
Simulating Jackal Jackal Tutorials 0 5 4 Documentation

No Shadows Or Lights In Gazebo Gazebo Q A Forum
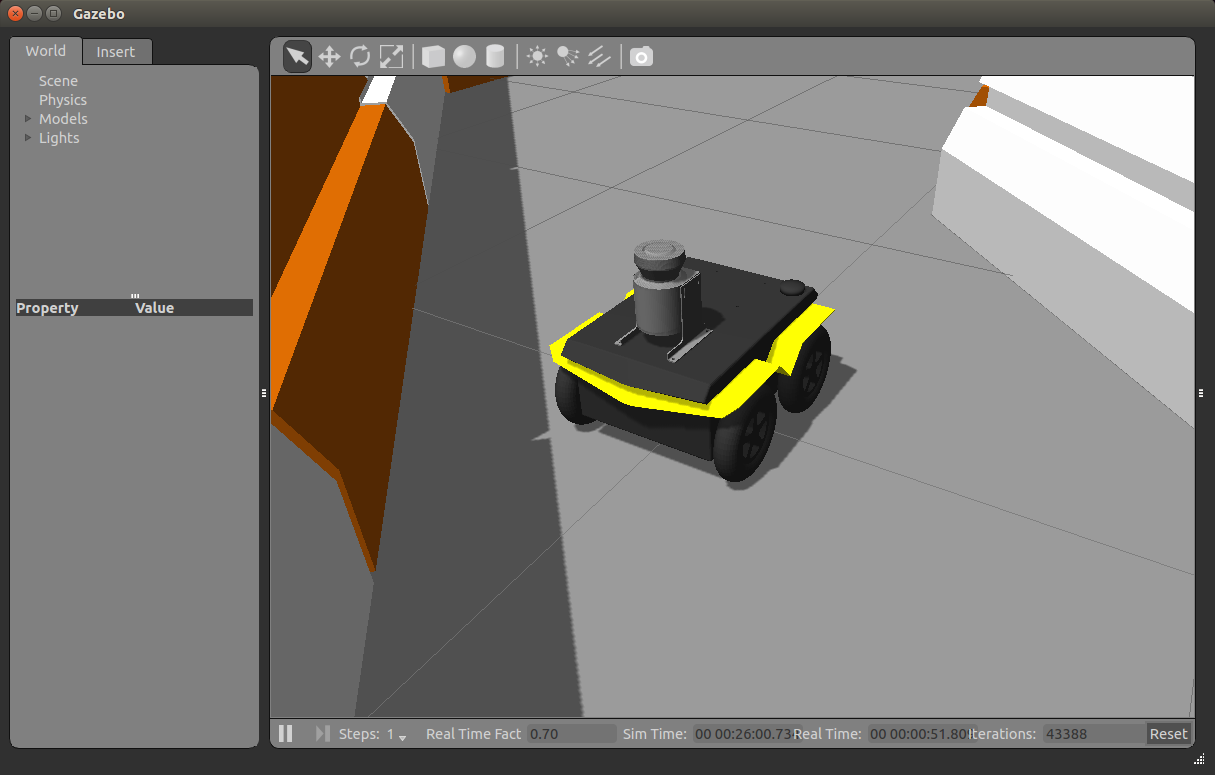
Simulating Jackal Jackal Tutorials 0 5 4 Documentation

Gazebo Gzweb
Gazebo Stuck At Preparing Your World Copter Simulation Ardupilot Discourse
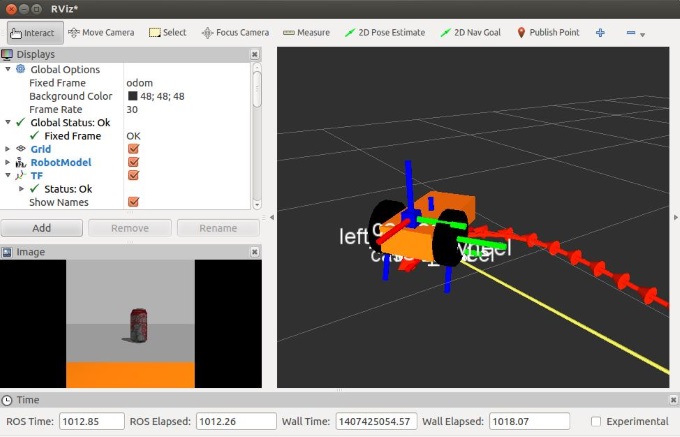
Drive A Husky Ros Tutorials 0 5 2 Documentation
How To Simulate A Robot Using Gazebo And Ros 2 Automatic Addison

Ubuntu 18 04 With Ros Melodic And Gazebo 9 Hovering Example Not Working Issue 25 Gsilano Crazys Github

