Gazebo is an open-source 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011. To start Gazebo see this guide.

240 Vehicles Shocks Moment Of Inertia 04 V4 2 Tutorial Series Unreal Engine Youtube Unreal Engine Video Game Development Engineering
Enhance your Paparzazzi airframe file to be able to use Gazebo see examplesardrone2_gazeboxml.

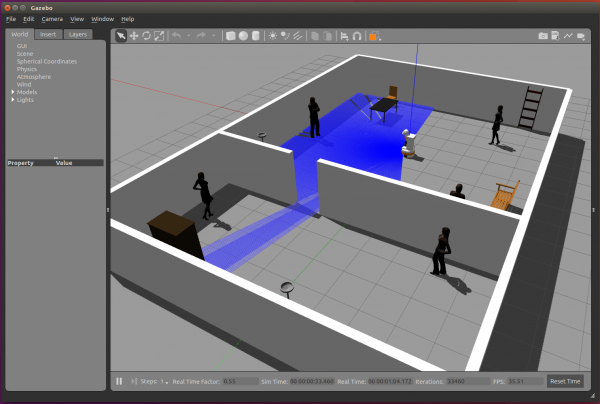
Gazebo simulator wiki. Gazebo is being refactored into the new Ignition Gazebo simulator. Gazebo is a 3D dynamic simulator with the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. This post is a wiki.
The SmartGazeboBaseServer component receives from and sends messages to gazebo containing the robots odometry the laser scans and the commanded velocity and offers those information to other SmartSoft components via its services. Gazebo simulator This is an autonomous driving car simulator based on Gazebo integrated in Autoware. Select Gazebo as the FDM Flight Dynamics Model by adding it to the aircraft file.
Simulated sensors Velodyne VLP-16 HDL-32E Camera IMU Input and output Input. The component illustrates how the Gazebo simulator can be used with in the SmartSoft ecosystem through components. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control.
Gazebo is an open-source 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011. In 2011 Gazebo became an independent project support by Willow GarageIn 2012 Open Source Robotics Foundation OSRF became the steward of the Gazebo. You will have to run git submodule init git submodule update to pull in the models.
These tutorials are for gazebo with ROS. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control. Gazebo simulator quick start guide Overview Autonomous driving car simulator based on Gazebo.
It includes multiple physics engines robot models sensors and interfaces. Gazebo is an open-source 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011. Gazebo is a well-known and respected robotics simulator and is also the official DARPA Virtual Robotics Simulator.
Gazebo is an open-source 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011. In 2011 Gazebo became an independent project supported by Willow GarageIn 2012 Open Source Robotics Foundation OSRF became the. Gazebo 11 is the last major release of Gazebo.
Simulator_gazeboTutorials - ROS Wiki. Blog gazebo simulator wiki. The Gazebo robot simulation.
Gazebo is an open-source a 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control. Additional world models can be found in the swexttudelft_gazebo_models.
Select field twist_cmd default or ctrl_cmd Debug cmd_vel. Please note that Gazebo requires working graphics card with OpenGL 3D accelerated driver to perform various rendering and image simulation tasks correctly. In 2011 Gazebo became an independent project supported by Willow Garage.
In 2011 Gazebo became an independent project supported by Willow GarageIn 2012 Open Source Robotics. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control. LGSVL simulator The LGSVL Simulator is a Unity-based multi-agent simulator integrated with ROS.
Previous PRs for built-in support were not merged as of April-2017. No current release has built-in support for ArduPilot however. Gazebo is an open-source 3D robotics simulatorGazebo was a component in the Player Project from 2004 through 2011.
The quick start guide is here. Asked 2019-07-15 234832 -0500. In 2012 Open Source Robotics Foundation OSRF became the steward of the Gazebo.
Gazebo is a 3D simulator typically used to simulate robots in a variety of environments. Gazebo can use multiple high-performance physics engines such as ODE Bullet etc the default is ODE. Click the picture below for a demonstration movie of the Gazebo simulator.
See documentation there thanks. This thin wrapper simply embeds app arguments like current working directories and the path to the model file. Anyone with karma 75 is welcome to improve it.
Gazebo simulator Last updated June 24 2019. Users are highly discouraged from using the documentation and tutorials for Gazebo on this page. Gazebo tutorials are organized into Guided and CategorizedDocumentation is also available for the API and a help forum is located at Gazebo Answers.
If ROS is already installed then Gazebo should already be installed as well. In 2011 Gazebo became an independent project supported by Willow GarageIn 2012 Open Source Robotics Foundation OSRF became the steward of the Gazebo. All currently supported Gazebo versions are still being maintained and may receive new backwards-compatible features and bug fixes until their end-of-life.
In 2011 Gazebo became an independent project supported by Willow GarageIn 2012 Open Source Robotics Foundation OSRF became the steward of the Gazebo. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control. However if you do not have a working graphics card you can still run Gazebo headless at the expense of not having camera simulations and a.
Check out Ignition Robotics to. Gazebo integrated the ODE physics engine OpenGL rendering and support code for sensor simulation and actuator control. While similar to game engines Gazebo offers physics simulation at a much higher degree of fidelity a suite of sensors and interfaces for both users and programs.
Remember to unset this environment variable if you need OpenGL for graphics eg point cloud visualization in Open3D.

Pioneer In Gazebo Gps Imu Navigation Matlab Oop Waypoint Guidance Robotics Computation Nps Wiki
Osrf Ariac Wiki Home Bitbucket
Ari Wiki Ros Simulator How To Get Started Pal Robotics Blog
Habit Shack Tiki Hut Make A Surf Shop Tiki Hut Tiki Room Tiki Bar Signs

Mood The Sims Wiki Vending Machine Sims Social Bar
Simulation Demo Wiki Autoware Foundation Movedtogithub Autoware Gitlab
Moving The Pioneer 3 Dx In Gazebo Lofaro Lab Wiki

Forest Of Tranquility Ninjago Wiki Fandom In 2021 Mountains Of Madness Tranquility Forest
Gazebo Tiago Smartsoft Scenario Robmosys Wiki

Assignment 4 Matlab Ros Interface And Gazebo Simulation 18 3 Multi Robot Control Nps Wiki
Ardupilot Wiki Using Gazebo Simulator With Sitl Rst At Master Ardupilot Ardupilot Wiki Github

Dishonored 2 Gazebo Vincent Gros On Artstation At Https Www Artstation Com Artwork Z5gwyw Dishonored Dishonored 2 Environmental Art
Gazebo Simulation Start Wiki Autoware Foundation Movedtogithub Autoware Gitlab

Installing Gazebo With Drc Hubo Model Dasl Wiki

From Wiki The Term Link Trainer Also Known As The Blue Box And Pilot Trainer 1 Is Commonly Used To Refer To A Serie Training Plan Pilot Training Train

Gotsoz4ozqm 1m

Gazebo And Pioneer At Robotics Computation Nps Wiki

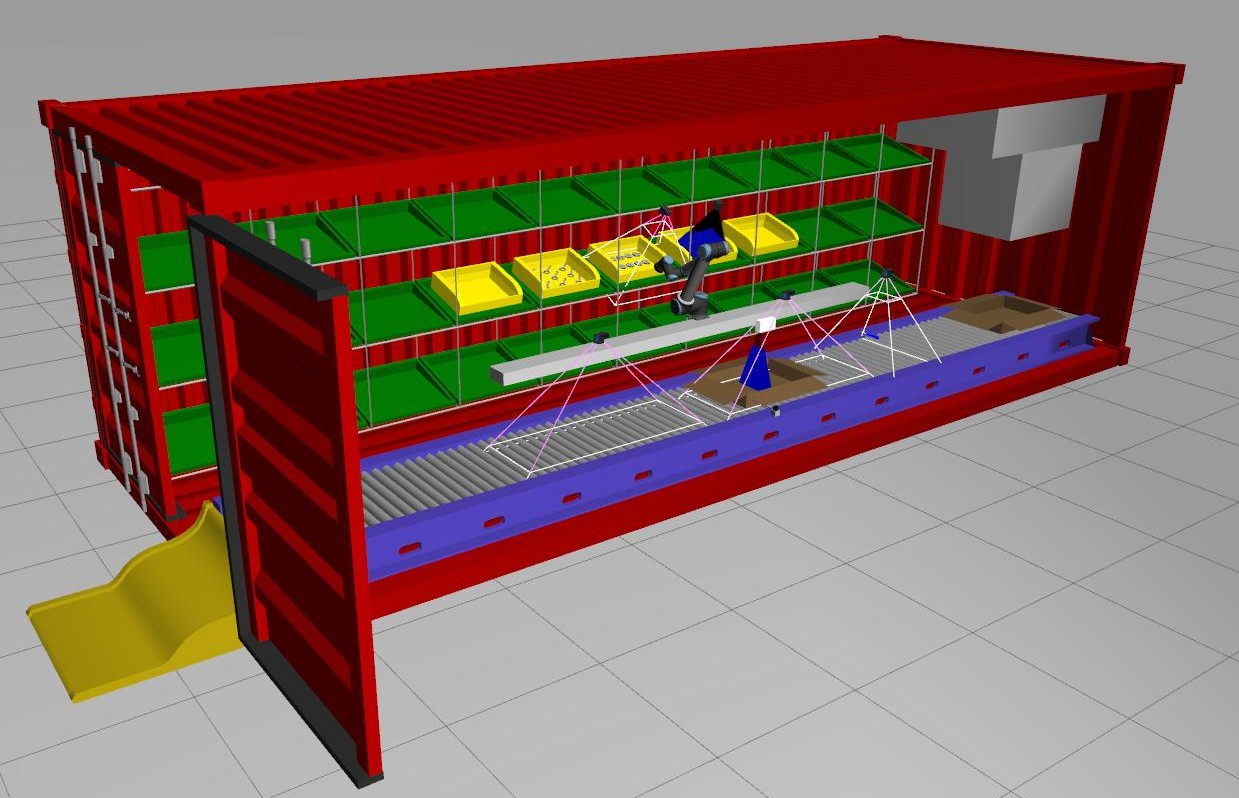
Announcing Release 3 0 0 Of Project Dave Underwater Robotics Simulation Maritime Robotics Ros Discourse

Gazebo And Pioneer At Robotics Computation Nps Wiki

